Electronique Mag - Le journal de l'électronique.
- accueil .
- abonnement .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 La collaboration sur la cartographie mobile et la sortie conjointe du kit de développement de cartographie mobile constituent la toute première étape que les deux parties ont franchie sur la base de leur partenariat stratégique. L’attention portée à la cartographie mobile 3D basée sur SLAM a augmenté ces dernières années, avec sa capacité à capturer automatiquement des données 3D pendant que la plate-forme mobile (comme les humains, les véhicules, les robots ou les drones) traverse la scène. Cette technologie innovante trouve des applications dans les villes intelligentes et l’urbanisme, la construction basée sur les TIC, l’inspection et la maintenance des infrastructures, la gestion des stocks dans les mines et les carrières, ainsi que les interventions d’urgence et la gestion des catastrophes.
La collaboration sur la cartographie mobile et la sortie conjointe du kit de développement de cartographie mobile constituent la toute première étape que les deux parties ont franchie sur la base de leur partenariat stratégique. L’attention portée à la cartographie mobile 3D basée sur SLAM a augmenté ces dernières années, avec sa capacité à capturer automatiquement des données 3D pendant que la plate-forme mobile (comme les humains, les véhicules, les robots ou les drones) traverse la scène. Cette technologie innovante trouve des applications dans les villes intelligentes et l’urbanisme, la construction basée sur les TIC, l’inspection et la maintenance des infrastructures, la gestion des stocks dans les mines et les carrières, ainsi que les interventions d’urgence et la gestion des catastrophes.
Différente de la cartographie 3D basée sur TLS (Terrestrial Laser Scanning), qui utilise des scanners laser fixes et prend du temps pour capturer des données précises de scènes statiques, la cartographie mobile 3D basée sur SLAM a gagné en attractivité sur le marché en raison de sa cartographie en temps réel de vastes étendues. Cependant, la cartographie mobile 3D basée sur SLAM n’est en général pas aussi précise que l’approche basée sur TLS en raison du bruit inhérent et des incertitudes dans les données des capteurs mobiles. C’est pourquoi un algorithme SLAM de qualité industrielle comme Kudan SLAM, capable de fusionner plusieurs capteurs, devient crucial pour se rapprocher de la précision de l’approche basée sur TLS tout en conservant les avantages d’une cartographie rapide pour de grandes zones.
 Dans le domaine de la fusion de plusieurs capteurs, la synchronisation temporelle joue un rôle central, jouant un rôle clé dans l’alignement précis de toutes les données des capteurs dans le domaine temporel. Ce processus critique permet l’association précise des mesures des capteurs avec les points de repère ou les caractéristiques correspondantes de l’environnement, réduisant ainsi efficacement les erreurs lors du traitement des données. De plus, la synchronisation temporelle contribue de manière significative à obtenir une estimation inestimable du mouvement et une détection de fermeture de boucle, ce qui entraîne une nette amélioration de la précision, de la fiabilité et de la qualité globale des résultats de cartographie basés sur SLAM.
Dans le domaine de la fusion de plusieurs capteurs, la synchronisation temporelle joue un rôle central, jouant un rôle clé dans l’alignement précis de toutes les données des capteurs dans le domaine temporel. Ce processus critique permet l’association précise des mesures des capteurs avec les points de repère ou les caractéristiques correspondantes de l’environnement, réduisant ainsi efficacement les erreurs lors du traitement des données. De plus, la synchronisation temporelle contribue de manière significative à obtenir une estimation inestimable du mouvement et une détection de fermeture de boucle, ce qui entraîne une nette amélioration de la précision, de la fiabilité et de la qualité globale des résultats de cartographie basés sur SLAM.
La solution de cartographie développée conjointement est un type d’appareil de cartographie 3D de type sac à dos/portable, qui exploite le SLAM 3D-Lidar exclusif de Kudan (KdLidar) avec la technologie de fusion multi-capteurs, ainsi que le contrôleur robuste VCM-1000F de Vecow pour une synchronisation temporelle précise et efficace.
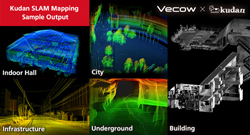
Le kit de développement de cartographie possède la capacité de générer de manière efficace et robuste des nuages de points 3D précis dans divers environnements, y compris les zones interdites au GNSS. Cela le rend adapté à un large éventail d’applications, telles que l’enquête forestière, l’étude des façades, la maintenance des infrastructures, l’enquête souterraine, le jumeau numérique industriel, la gestion des actifs des installations, la mesure du volume et la construction de TIC.
 Le kit de développement de cartographie, en conjonction avec le logiciel KudanStudio, offre une interface conviviale et des flux de travail rationalisés, le rendant accessible aux utilisateurs de tous niveaux. Cette conception intuitive permet à quiconque d’effectuer une collecte de données appropriée et de générer rapidement des nuages de points 3D très précis avec une précision allant jusqu’à 1 cm, sans avoir besoin de compétences spécialisées. De plus, le système prend en charge des paramètres détaillés lors du post-traitement des données, facilitant la création de nuages de points 3D optimaux avec des densités et des tailles variables pour des cas d’utilisation spécifiques, tout en préservant les données brutes d’origine pour les réutiliser. De plus, l’inclusion de la fonction de gestion des cartes automatise la fusion transparente de plusieurs données de nuages de points, garantissant ainsi une maintenance efficace des nuages de points et une utilisation des données sur de vastes zones.
Le kit de développement de cartographie, en conjonction avec le logiciel KudanStudio, offre une interface conviviale et des flux de travail rationalisés, le rendant accessible aux utilisateurs de tous niveaux. Cette conception intuitive permet à quiconque d’effectuer une collecte de données appropriée et de générer rapidement des nuages de points 3D très précis avec une précision allant jusqu’à 1 cm, sans avoir besoin de compétences spécialisées. De plus, le système prend en charge des paramètres détaillés lors du post-traitement des données, facilitant la création de nuages de points 3D optimaux avec des densités et des tailles variables pour des cas d’utilisation spécifiques, tout en préservant les données brutes d’origine pour les réutiliser. De plus, l’inclusion de la fonction de gestion des cartes automatise la fusion transparente de plusieurs données de nuages de points, garantissant ainsi une maintenance efficace des nuages de points et une utilisation des données sur de vastes zones.
« Grâce à notre collaboration, elle ne se limite pas à un seul matériel ou logiciel. Elle englobe plutôt une solution complète d’intégration logicielle et matérielle, mettant en valeur la force technique des deux parties », a déclaré Alex Liu, BDM de Vecow. « La technologie de synchronisation temporelle de Vecow sera combinée avec les capacités SLAM de cartographie lidar 3D et de fusion de capteurs de Kudan, dans le but d’améliorer la précision et la robustesse des données de capteurs pour les robots et véhicules mobiles autonomes extérieurs. Nous sommes enthousiasmés par les perspectives de nouvelles alliances commerciales avec Kudan. »
« La sortie de cette solution de cartographie conjointe constitue un exemple remarquable de la puissance de la collaboration et de la valeur de l’intégration de technologies de pointe », a déclaré Tian Hao, directeur et COO de Kudan. « Doté d’un algorithme sophistiqué et de capacités avancées de fusion de capteurs, Kudan SLAM peut servir des applications polyvalentes dans divers secteurs. En collaboration avec Vecow, nous nous engageons à continuer de responsabiliser l’industrie en tirant parti du partenariat avec les technologies des deux parties. Nous pensons que l’innovation ne connaît pas de limites lorsque des entreprises visionnaires s’unissent. »
Une technologie de synchronisation temporelle précise et fiable est devenue de plus en plus cruciale, non seulement pour la cartographie, mais également pour la conduite autonome et les systèmes robotiques mobiles autonomes en extérieur. La solution Vecow Time Sync est construite sur la plateforme Xilinx Ultrascale+ MPSoC, offrant trois technologies clés et abordant cinq sujets critiques : cartographie, fusion de capteurs, étalonnage, localisation et navigation. La solution vise à améliorer les capacités de perception, de position et de précision.



